







Vad är en cobot och vad är dess fördelar i industriellt arbete?
Cobotar blir allt vanligare i industriella arbetsmiljöer och Treston har redan lyckats implementera flera arbetsstationer runt cobotar. Vid utformningen av cobotvänliga arbetsstationer måste många aspekter beaktas, såsom ergonomin i arbetet, de fysiska kraven på cobotarna och graden av samarbete mellan coboten och människan. I den här artikeln kommer vi att gå igenom vad cobotar är och vilka fördelar det är med att använda dem i en industriell arbetsmiljö.

Vad är en cobot?
En cobot är en robot som samarbetar med människor och behöver inga speciella säkerhetsanordningar runt den. Till skillnad från en vanlig robot kan den också vara i kontakt med en människa.
Cobotar föddes ursprungligen för att förbättra ergonomin i arbetet och öka samarbetet mellan människor och robotar i olika branscher. Cobotar används för att förbättra hälsa och säkerhet på arbetsplatsen, bygga mer meningsfulla arbetsmiljöer för anställda och öka arbetseffektiviteten och den ekonomiska tillväxten.
Strukturen hos en cobot är ofta lätt, så att den säkert kan integreras för att arbeta på samma arbetsstation som en människa. Cobotar kan också monteras på mobila arbetsstationer, till exempel vagnar, så att de kan användas i flera arbetsstationer.
Vilka typer av uppgifter kan en cobot utföra?
Cobotar kan utföra svåra, tråkiga, repetitiva arbetsmoment som lätt orsakar muskuloskeletala störningar. De kan ofta också förbättra säkerheten i arbetet. Ergonomiskt utmanande eller monotona arbetsmoment som limning, skruvning, packning och uppgifter som kräver räckvidd är lämpliga att överföras till en cobot.
Människa-robot-interaktion (HRC)
Cobotar ersätter inte arbetare, men de samarbetar med människor. I samband med cobotar och robotar används ofta termen HRC, vilket betyder människa-robot-samarbete. HRC har fem olika nivåer (nivåer av samarbete, LoC), som bestäms enligt robotens tekniska egenskaper och arbetskraven.
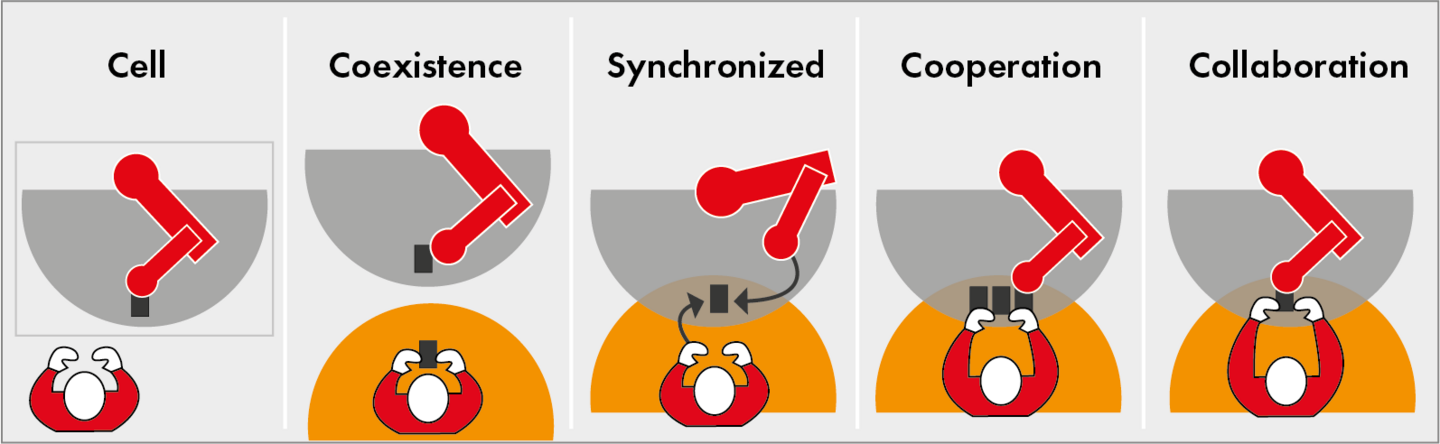
- Nivå 1: Cell
Människan och roboten arbetar i olika celler. - Nivå 2: Samexistens
Människan och roboten befinner sig i samma miljö, men de interagerar inte. - Nivå 3: Synkroniserad
Människan och roboten arbetar i samma utrymme vid olika tidpunkter. - Nivå 4: Samverkan
Människan och roboten arbetar i samma arbetsyta samtidigt, men de utför olika uppgifter. - Nivå 5: Samarbete
Människan och roboten utför en uppgift tillsammans.
Trestons cobotvagn tillgodoser kundens behov
Kolla in videon för ett exempel på Cobot-vagnen designad av Treston och ABB tillsammans.
Fördelarna med en cobot-arbetsstation för arbetsgivaren
Tre av fem personer i arbetsför ålder uppger arbetsrelaterade belastningsbesvär och samtidigt blir arbetskarriärerna allt längre. Kostnaderna för sjukfrånvaro och företagshälsovård ökar ständigt. När en cobotarbetsplats planeras på arbetsplatsen är arbetsgivarens intresse ofta att minimera säkerhetsrisker och produktionstid samt att förbättra kvalitet och effektivitet. Dessa faktorer används också som utvärderingskriterier för framgången för cobot-arbetsstationer.
- Mindre sjukfrånvaro och minskade sjukvårdskostnader.
- Arbetskarriären blir längre.
- Anställda förbinder sig till sitt arbete.
- Medarbetarnas prestationer kan optimeras för arbetsuppgifter som kräver skicklighet.
- Medarbetarnas motivation förbättras.
- Kvaliteten förbättras.
- Produktiviteten ökar.
- Produktionstiden reduceras.
Fördelarna med cobot-arbetsstationen för medarbetaren
Ur arbetstagarens synvinkel förbättrar hälsosamt, säkrare och mindre repetitivt arbete motivationen och arbetets meningsfullhet. Tack vare cobotar kan anställda också utveckla sina egna färdigheter, och arbetstiden kan användas för uppgifter som kräver mer skicklighet.
- Arbetet är säkrare.
- Arbetet är mer meningsfullt eftersom det finns färre monotona uppgifter och repetitioner.
- Risken för skador minskar, vilket leder till en hälsosammare fritid.
- Det finns färre obekväma arbetsställningar.
- Tillfredsställelsen med sitt arbete förbättras.
Vilka typer av utmaningar kan uppstå med cobotar?
Cobotar har blivit betydligt vanligare de senaste åren, och det kan bevisas att de har många bra egenskaper i industriella arbetsmiljöer, men de kommer naturligtvis också med utmaningar. Det bör nämnas att arbete med teknik kan medföra olika psykologiska utmaningar i arbetet.
Att arbeta med coboten, som med andra nya verktyg, kräver att man lär sig något nytt. Möjligheten att justera cobotens egenskaper, såsom hastighet, och korrekt förtrogenhet är viktiga punkter att tänka på vid drifttagning.
Källor:
Guilherme Deola Borges, Paula Carneiro, and Pedro Arezes
Human Factors Effects on a Human-Robot Collaboration System: A Modelling Approach, University of Minho, Guimaraes, Portugal
- Federico Fraboni, Luca Gualtieri , Francesco Millo, Matteo De Marchi, Luca Pietrantoni, and Erwin Rauch
Human-Robot Collaboration During Assembly, Tasks: The Cognitive Effects of Collaborative, Assembly Workstation Features - Luca Gualtieri1, Federico Fraboni, Matteo De Marchi, and Erwin Rauch
Evaluation of Variables of Cognitive Ergonomics in Industrial Human-Robot Collaborative, Assembly Systems - Alberto Ranavolo, Giorgia Chini, Francesco Draicchio, Alessio Silvetti, Tiwana Varrecchia, Lorenzo Fiori, Antonella Tatarelli, Patricia Helen Rosen, Sascha Wischniewski, Philipp Albrecht, Lydia Vogt, Matteo Bianchi, Giuseppe Averta, Andrea Cherubini, Lars Fritzsche, Massimo Sartori, Bram Vanderborght, Renee Govaerts, and Arash Ajoudani
Human-Robot Collaboration (HRC) Technologies for Reducing Work-Related Musculoskeletal Diseases in Industry 4.0 - Guilherme Deola Borges, Paula Carneiro, and Pedro Arezes
Human Factors Effects on a Human-Robot Collaboration System: A Modelling Approach

Upptäck dolda besparingar på din arbetsplats med ErgoSavings-kalkylatorn
En väl utformad arbetsplats förbättrar medarbetarnas trivsel, minskar risken för skador och ökar produktiviteten - vilket i slutändan påverkar företagets resultat positivt. Med ökade investeringar i ergonomi lanserar Treston nu ErgoSavings-kalkylatorn – ett verktyg som hjälper företag att beräkna sina potentiella besparingar och uppleva vilken påverkan ergonomiska lösningar kan ha.

Att välja den bästa anpassningsbara elektriska arbetsbänken
Att välja rätt arbetsbänk för din industriella arbetsplats är ett avgörande beslut som påverkar både ergonomi och produktivitet. Med ett brett utbud av arbetsbänkar tillgängliga, från lätta till tunga modeller, är det viktigt att ta hänsyn till faktorer som lastkapacitet, tillbehörsalternativ och övergripande flexibilitet.
Treston erbjuder en mängd olika anpassningsbara, ESD-säkra och hållbara arbetsbänkar som är utformade för att möta kraven från olika branscher, från elektronikmontering till tung tillverkning.
I det här inlägget jämför vi våra fyra elektriskt höj- och sänkbara toppmodeller – TED, WB, QuatreX och Concept – så att du kan hitta den perfekta lösningen för dina specifika industriella behov. Vår jämförelse fokuserar på två nyckelelement: lastkapacitet och utbudet av tillgängliga tillbehör.
Treston erbjuder en mängd olika anpassningsbara, ESD-säkra och hållbara arbetsbänkar som är utformade för att möta kraven från olika branscher, från elektronikmontering till tung tillverkning.
I det här inlägget jämför vi våra fyra elektriskt höj- och sänkbara toppmodeller – TED, WB, QuatreX och Concept – så att du kan hitta den perfekta lösningen för dina specifika industriella behov. Vår jämförelse fokuserar på två nyckelelement: lastkapacitet och utbudet av tillgängliga tillbehör.

I större lokaler är skräddarsydda, modulära arbetsstationer ofta den pusselbit som saknas
I dagens större anläggningar är arbetsstationer inte längre fasta tillbehör utan dynamiska verktyg som driver effektivitet. Denna utveckling har förändrat hur operatörer i olika branscher närmar sig sina arbetsplatsbehov. I den här artikeln fördjupar vi oss i världen av större arbetsstationer för anläggningar, vägledda av insikterna från Thierry Peron, Treston Frankrikes försäljningschef.
Upptäck hur mångsidiga arbetsstationer anpassar sig till olika uppgifter, förbättrar ergonomisk komfort och fyller luckorna där fasta lösningar brister, vilket i slutändan förbättrar driftseffektiviteten i större anläggningar.
Upptäck hur mångsidiga arbetsstationer anpassar sig till olika uppgifter, förbättrar ergonomisk komfort och fyller luckorna där fasta lösningar brister, vilket i slutändan förbättrar driftseffektiviteten i större anläggningar.



Se vad våra kunder säger
Treston QuatreX arbetsbänkar gjorde vårt team mer bekvämt och hjälpte till att effektivisera vår verksamhet.
Sofia Salmi, CEO Pihka Collection
Läs kundhistorier
"Trestons NaturLite LED-lampor kan faktiskt minska antalet ljuskällor eftersom de ger så mycket ljus."
Daniel Norberg, produktionsingenjör, Senseair AB
Läs kundhistorier
Samarbetet med Treston var smidigt, avslappnat och professionellt när vi utvecklade cobot-vagnen tillsammans
Juha Mainio, ABB Robotics
Läs kundhistorier
"Treston's LEAN och 5S-kompatibla industrimöbler ger effektivitet och säkerhet till produktionen"
Antti Pitkänen, Inköps- och logistikchef, Avesco
Läs kundhistorier
Med Trestons lösningar har vi nu möjligheten att snabbt konvertera bänkar från en uppgift till en annan
Catarina Nascimento, Special Projects Manager
Läs kundhistorier
Tack vare anpassningsbara lösningar minskade genomloppstiden vid godsmottagning från tre veckor till två dagar
Thomas Janker, Head of Purchasing, Sport Conrad
Läs kundhistorier
Med de nya arbetsstationerna har de anställdas arbetsergonomi förbättrats avsevärt
Tapio Roiha, CEO, Cycli
Läs kundhistorier